
Dzisiejsze protezy mogą kosztować nawet setki tysięcy złotych. Jednak dzięki wykorzystaniu nowych technologii, takich jak druk 3D, możemy sprawić, że cena protezy może zmaleć nawet do kilku tysięcy złotych. Oznacza to, że o wiele większa ilość osób po amputacjach będzie mogła skorzystać z tego udogodnienia. Open Hand Project jest projektem open-source co oznacza, że można nieustannie go udoskonalać i może być używany bez ograniczeń przez wszystkich.
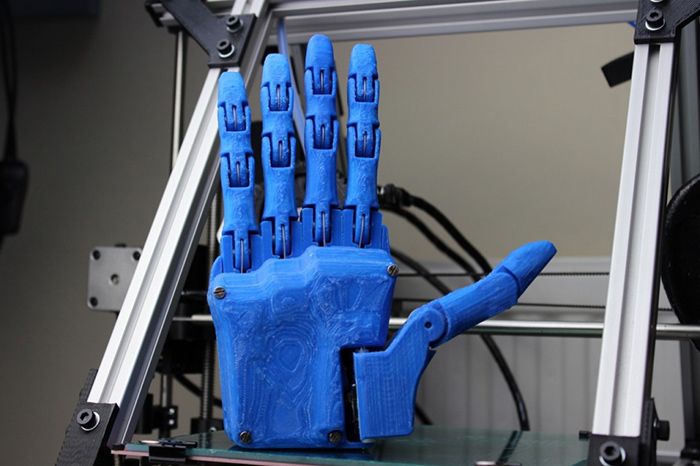
Dextrus jest niemal tak funkcjonalna jak ludzka ręka. Zamiast mięśni wykorzystane są silniki serwo, a zamiast ścięgien stalowe linki. Warto dodać, że stalowe linki wytrzymują obciążenie zrywające do 18 kg na każdy palec. Dłoń sterowana jest elektronicznie, aby nadać jej jak najbardziej ludzkie odruchy.
Materiał:
Najdroższą częścią zrobotyzowanej ręki jest materiał niezbędny do jej stworzenia – tytan i włókno węglowe. Te materiały zapewniają trwałość nawet przez kilkumiesięczne używanie ręki bez przerwy. W tym projekcie większość dłoni zostanie wykonana z ABS – to również bardzo trwały materiał, a kosztuje znacznie mniej. Dextrus jest zaprojektowana tak, aby po uszkodzeniu się jednej części łatwo i szybko można ją było wymienić.
Funkcjonalność:
Niektóre protezy mają to do siebie, że palce uruchamiane są w synchroniczny sposób i nie ma możliwości ruchu pojedynczego palca. W Dextrus każdy palec jest uruchamiany za pomocą niezależnego cięgna, dlatego „chwytliwość” i funkcjonalność dłoni jest o wiele lepsza.
Chwytliwość:
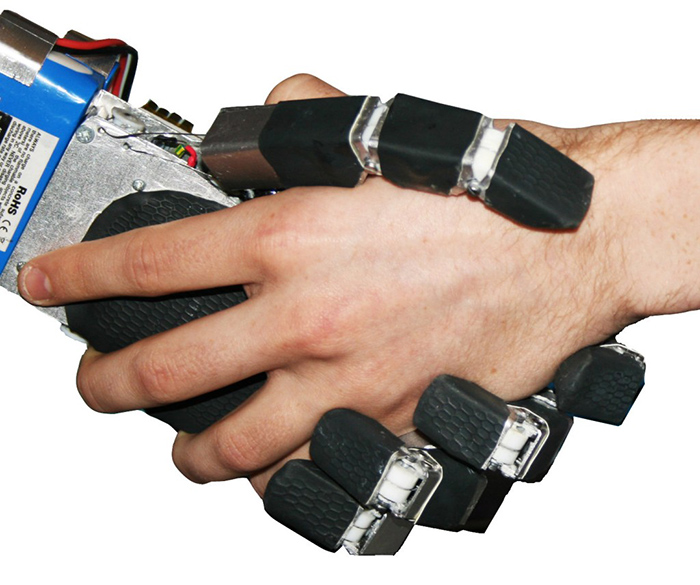
Dextrus ma niemal wbudowany zmysł dotyku, przy użyciu czujników wie kiedy następuje uchwycenie obiektu. Dlatego oferuje wystarczającą przyczepność, aby uchwycić delikatne przedmioty, ale i posiada wystarczająco dużo siły, aby trzymać ciężkie przedmioty.
Zasilanie:
Wstępne badania sugerują, że ręka Dextrus będzie w stanie pracować przez około 8-12 godzin na jednym ładowaniu z baterii litowo-jonowych.
Projekt został zainicjowany przez Joela Gibbard mieszkającego w Wielkiej Brytanii, jest wielkim pasjonatem roboty oraz nowych technologii,
Projekt można wspomóc na indiegogo kupując różne gadżety takie jak koszulki, obudowy do komórek albo podstawki pod jajko.